C-413.1G
PIMag® motion controller, 1 channel, benchtop device , TCP/IP interface, force control option

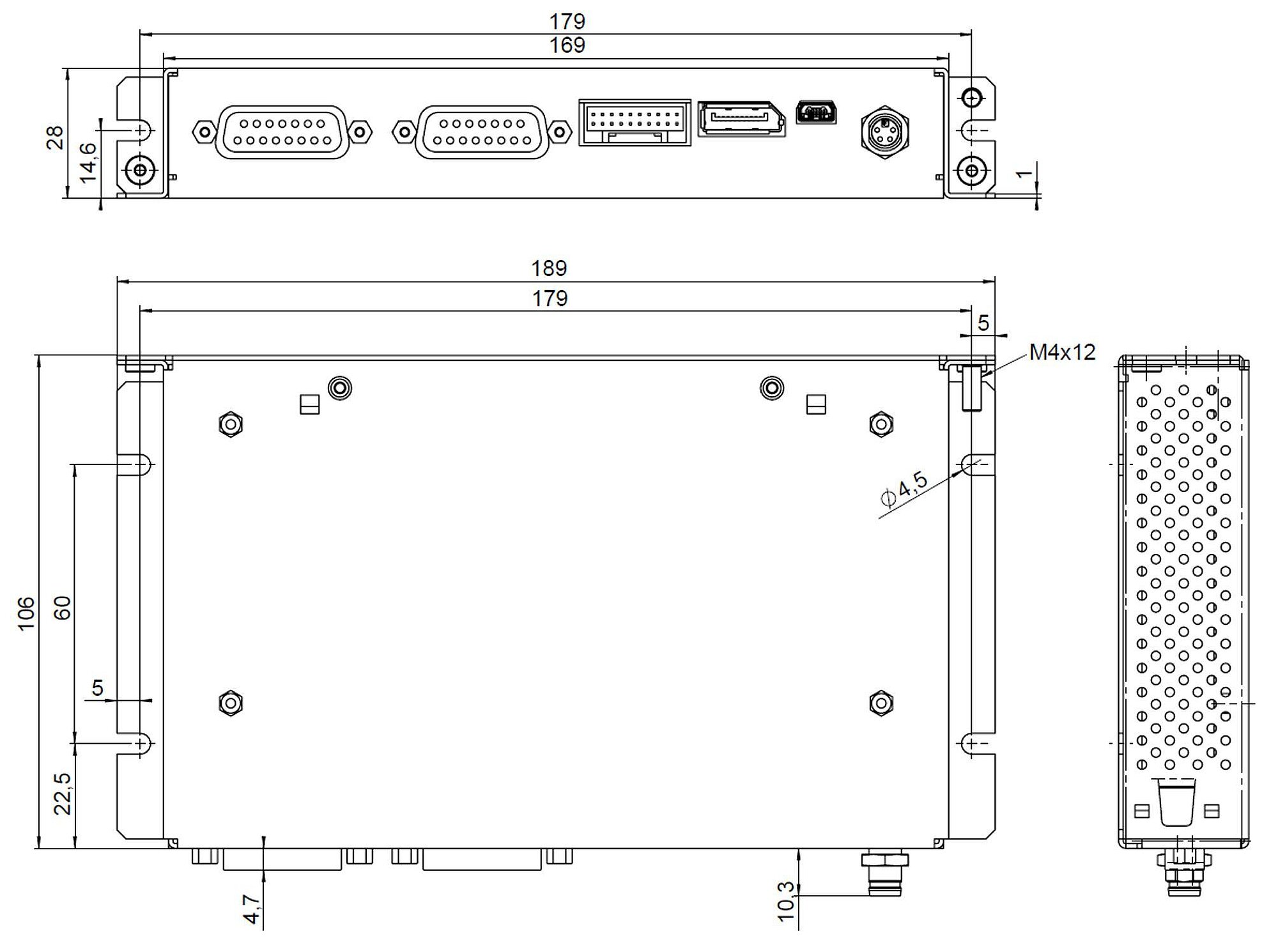
C-413.2G and C-413.2GA, dimensions in mm
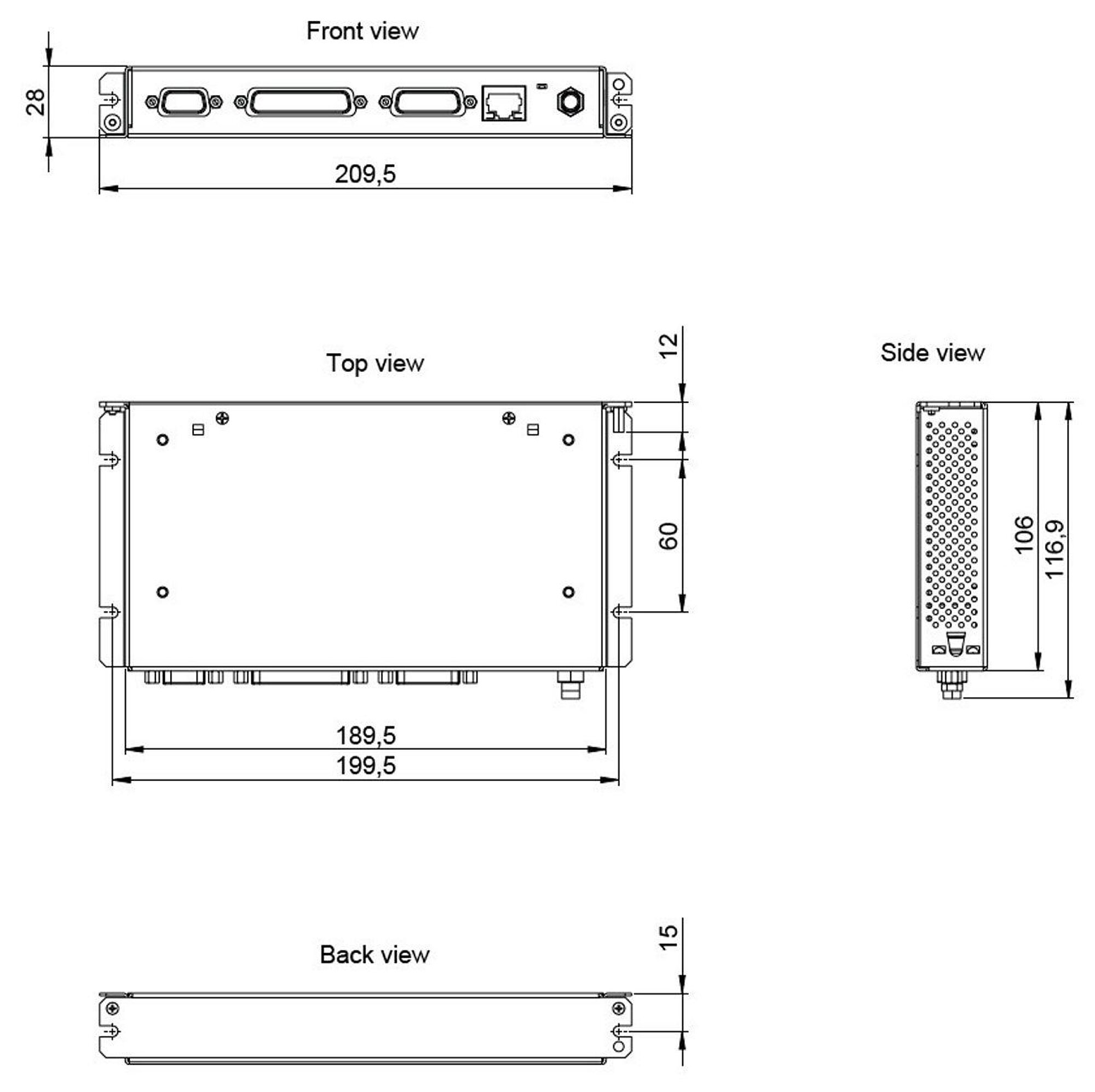
C-413.1G, dimensions in mm



Digital motion controller for PIMag® voice coil drives
C-413.1: 1 motor channel, 2 sensor channels
C-413.2: 2 motor channel, 4 sensor channels
PID controller for force, position, velocity. Servo update rate selectable between 5 to 10 kHz
Force control
Force control allows operation of PIMag® drives and positioners with a defined holding or feed force. The force and position sensors can be read simultaneously and the values processed. In addition to pure force control, subordinate position control, and velocity control is also an option. PI offers PIMag® actuators with a force sensor. The C-413.2GA model allows external force sensors to be read via analog inputs
Protection of the mechanics
The AutoZero function defines the holding current at which the drive outputs an open-loop force of 0 N, e.g., for compensating the weight force. An I2t monitoring prevents the drive from overheating due to overcurrent
Extensive functionality
Data recorder: Recording of operating data such as motor current, velocity, position or position error. Wave generator: Saves and outputs periodic motion profiles. ID chip support: Detects the mechanics connected and simplifies configuration and interchangeability. Supports direction-sensing reference switches. Extensive software support, e.g., for NI LabVIEW, dynamic libraries for Windows and Linux
Interfaces
Depending on the model, commanding via TCP/IP, USB 2.0, SPI. Digital inputs and outputs for automation. Optional analog inputs and outputs, e.g., for sensors, commanding or position feedback
| Basics | C-413.1G | C-413.2G | C-413.2GA | |
|---|---|---|---|---|
| Housing type | Benchtop device | Benchtop device | Benchtop device | |
| Drive type | Voice coil | Voice coil | Voice coil | |
| Axes | 1 | 2 | 2 | |
| Application-related functions | Data recorder | Data recorder | Data recorder | |
| Drive functions | AutoZero ǀ Surface detection in force control mode | AutoZero ǀ Surface detection in force control mode | AutoZero ǀ Surface detection in force control mode | |
| Protective functions | Deactivation of the voltage output in case of internal overheating ǀ Switch-off of the servo mode in case of an error ǀ Overheat protection of the motor | Deactivation of the voltage output in case of internal overheating ǀ Switch-off of the servo mode in case of an error ǀ Overheat protection of the motor | Deactivation of the voltage output in case of internal overheating ǀ Switch-off of the servo mode in case of an error ǀ Overheat protection of the motor | |
| Configuration management | Reading the ID chip ǀ Manual parameter input | Reading the ID chip ǀ Manual parameter input | Reading the ID chip ǀ Manual parameter input | |
| Supported ID chip | ID chip 2.0 | ID chip 2.0 | ID chip 2.0 | |
| Motion and control | C-413.1G | C-413.2G | C-413.2GA | |
| Supported sensor signal | SPI | SPI | SPI | |
| Control variables | Position ǀ Velocity ǀ Force | Position ǀ Velocity ǀ Force | Position ǀ Velocity ǀ Force | |
| Maximum control frequency (servo cycle) | 10000 Hz | 10000 Hz | 10000 Hz | |
| Motion types | Point-to-point motion ǀ Point-to-point motion with profile generator ǀ Wave generator | Point-to-point motion ǀ Point-to-point motion with profile generator ǀ Wave generator | Point-to-point motion ǀ Point-to-point motion with profile generator ǀ Wave generator | |
| Reference switch input | TTL | TTL | TTL | |
| Interfaces and operation | C-413.1G | C-413.2G | C-413.2GA | |
| Communication interfaces | TCP/IP | SPI ǀ USB 2.0 | SPI ǀ USB 2.0 | |
| Motion-dependent inputs and outputs | Digital trigger input ǀ Digital trigger output ǀ Digital output servo cycle ǀ Analog control output ǀ Analog output for monitor of axis position ǀ Analog output for monitor of axis velocity ǀ Analog output for monitor of axis force | Digital trigger input ǀ Digital trigger output ǀ Digital output servo cycle | Digital trigger input ǀ Digital trigger output ǀ Digital output servo cycle ǀ Analog control input ǀ Analog sensor input ǀ Analog control output ǀ Analog output for monitor of axis position ǀ Analog output for monitor of axis velocity ǀ Analog output for monitor of axis force | |
| On/off switch | On/off via power supply | On/off via power supply | On/off via power supply | |
| Display and indicators | Status LED ǀ Error LED | — | — | |
| Command set | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| User software | PIMikroMove | PIMikroMove | PIMikroMove | |
| Application programming interfaces | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| Linearization | 4th order polynomials | 4th order polynomials | 4th order polynomials | |
| Analog outputs | 2 | — | 2 | |
| Analog output signal | -10 to +10 V, 1 kHz | — | -10 to +10 V, 1 kHz | |
| Digital resolution of the analog output | 17 bit | — | 17 bit | |
| Digital inputs | 4 | 4 | 4 | |
| Digital input signal | EN 61131-2, type 3 inputs, 11 V to 30 V, 6 mA max. input current | 5 V TTL level, up to 24 V max. input voltage, 10 kΩ input resistance | 5 V TTL level, up to 24 V max. input voltage, 10 kΩ input resistance | |
| Digital outputs | 6 | 6 | 6 | |
| Digital output signal | 24 V driver outputs (drives EN 61131-2, type 3 inputs) | Open collector (range 5 V to 24 V, 33 kΩ internal pull-up to 5 V) | Open collector (range 5 V to 24 V, 33 kΩ internal pull-up to 5 V) | |
| Analog inputs | — | — | 2 | |
| Analog input signal | — | — | -10 to +10 V, 1 kHz | |
| Digital resolution of the analog input | — | — | 16 bit | |
| Amplifier | C-413.1G | C-413.2G | C-413.2GA | |
| Sensor | C-413.1G | C-413.2G | C-413.2GA | |
| Sensor channels | 2 | 4 | 4 | |
| Electrical properties | C-413.1G | C-413.2G | C-413.2GA | |
| Output voltage | Max. 24 V | Max. 24 V | Max. 24 V | |
| Peak output current | 1500 mA | 1500 mA | 1500 mA | |
| Miscellaneous | C-413.1G | C-413.2G | C-413.2GA | |
| Motor/actuator connector | D-sub 9 (f) | D-sub 15 (f) | D-sub 15 (f) | |
| Sensor connector | D-sub 25 (f) | D-sub 15 (f) | D-sub 15 (f) | |
| Connector analog output | D-sub 15 (f) | — | PUD panel plug 20-pole (m) | |
| Connector digital input | D-sub 15 (f) | PUD panel plug 20-pole (m) | PUD panel plug 20-pole (m) | |
| Connector digital output | D-sub 15 (f) | PUD panel plug 20-pole (m) | PUD panel plug 20-pole (m) | |
| Connector TCP/IP | RJ45 socket, 8P8C | — | — | |
| Connector for supply voltage | M8 4-pole (m) | M8 4-pole (m) | M8 4-pole (m) | |
| Operating voltage | 24 V | 24 V | 24 V | |
| Power adapter | Included in the scope of delivery ǀ Power adapter 24 V DC | Included in the scope of delivery ǀ Power adapter 24 V DC | Included in the scope of delivery ǀ Power adapter 24 V DC | |
| Maximum current consumption | 2 A | 2 A | 2 A | |
| Operating temperature range | 5 to 50 °C | 5 to 50 °C | 5 to 50 °C | |
| Overall mass | 350 g | 300 g | 300 g | |
| Connector USB | — | USB socket Mini-B | USB socket Mini-B | |
| Connector SPI | — | DisplayPort | DisplayPort | |
| Connector analog input | — | — | PUD panel plug 20-pole (m) |
Dimensions C-413.1G: 210 mm × 28 mm × 105 mm
C-413 PIMag® Motion Controller
SPI Interface of C-413 PIMag® Controllers
C-413.1G PIMag® Motion Controller
Implementing a C-887 PI Controller in TwinCAT 3.1
Updating PI Software with PIUpdateFinder
GCS Array Data Format
PIMikroMove
PI GCS DLL
PI MATLAB Driver GCS 2.0
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
Updating controller firmware with PIFirmwareManager
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
PIMag® motion controller, 1 channel, benchtop device , TCP/IP interface, force control option
PIMag® motion controller, 2 channels, benchtop device , USB and SPI interface, force control option
PIMag® motion controller, 2 channels, benchtop device , USB and SPI interface, analog inputs, force control option




